07. Planning Subsystem Components
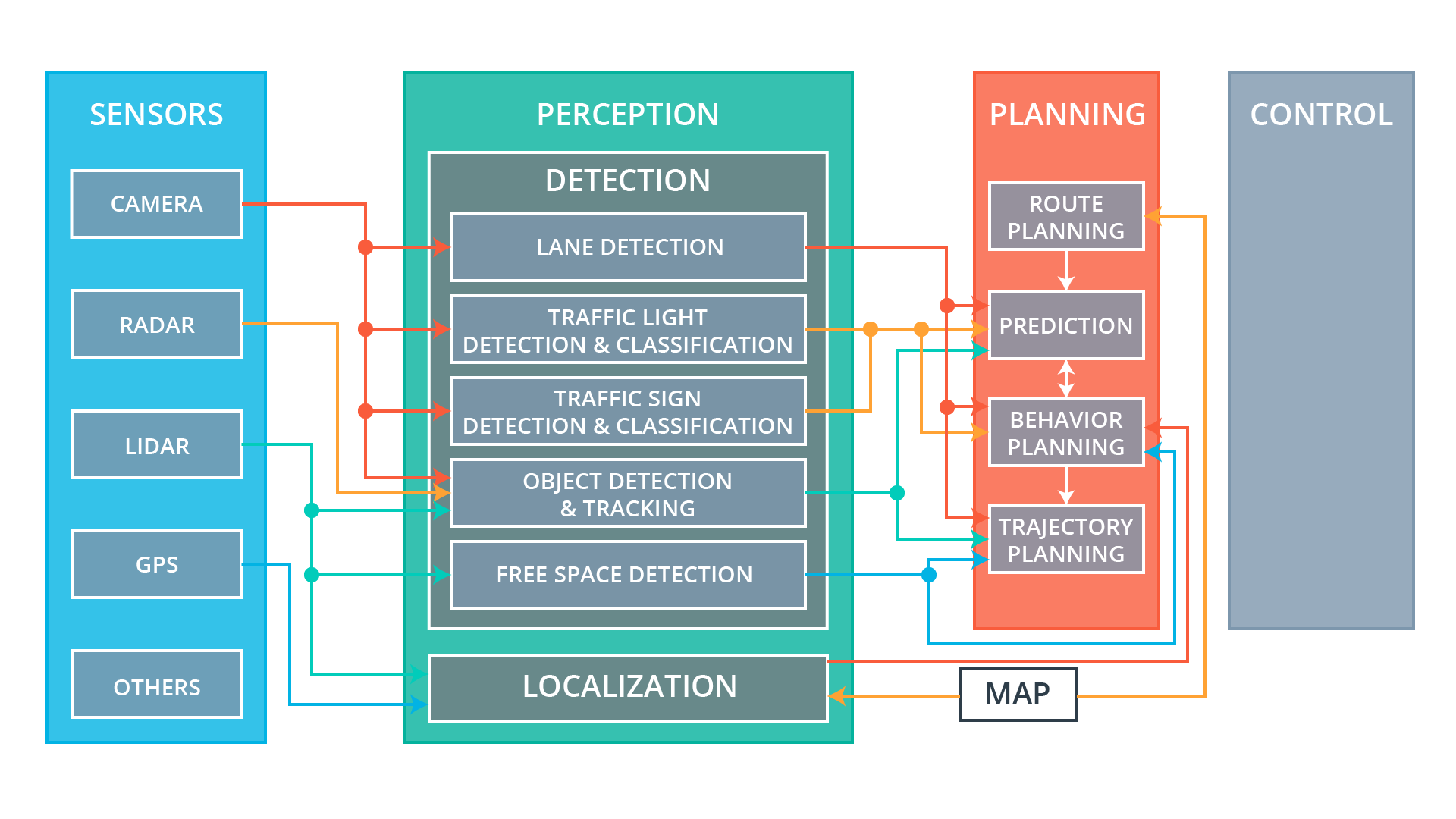
The major components of the planning subsystem components are route planning, prediction, behavioral planning, and path planning.
Route planning
The route planning component is responsible for high-level decisions about the path of the vehicle between two points on a map; for example which roads, highways, or freeways to take. This component is similar to the route planning feature found on many smartphones or modern car navigation systems.
Prediction
The prediction component estimates what actions other objects might take in the future. For example, if another vehicle were identified, the prediction component would estimate its future trajectory.
Behavioral planning
The behavioral planning component determines what behavior the vehicle should exhibit at any point in time. For example stopping at a traffic light or intersection, changing lanes, accelerating, or making a left turn onto a new street are all maneuvers that may be issued by this component.
Trajectory planning
Based on the desired immediate behavior, the trajectory planning component will determine which trajectory is best for executing this behavior.
Have a look at the quizzes below to test your knowledge of the planning subsystem:
Prediction quiz
SOLUTION:
- Lane detection
- Free space detection
- Vehicle detection
- Traffic sign classification
Behavioral planning quiz
SOLUTION:
- Lane detection
- Free space detection
- Vehicle detection
- Traffic sign classification
- Localization
L1 12 L Planning Subsystem Connections